Search Results
Terrain-Adaptive, ALIP-Based Bipedal Locomotion Controller via MPC and Virtual Constraints-Short
Terrain-Adaptive, ALIP-Based Bipedal Locomotion Controller via MPC and Virtual Constraints-Extended
Dynamic Walking of Bipedal Robots on Uneven Stepping Stones via Adaptive-frequency MPC
Dynamic Bipedal Locomotion
Cassie video
Bipedal locomotion
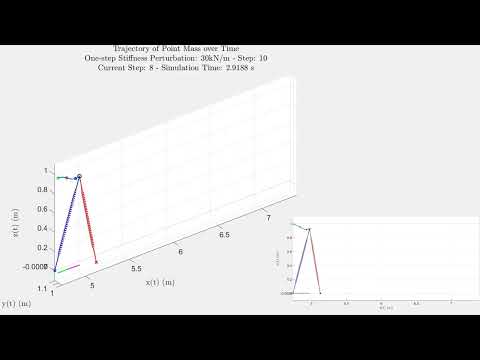
Robust Dynamic Walking for a 3D Dual-SLIP Model under One-Step Unilateral Stiffness Perturbations
Bipedal Locomotion Testbed
Humanoid Crab Walk LOL
SHERPA VS BOSTON DYNAMICS
Linear Policies are Sufficient to Realize Robust Bipedal Walking on Challenging Terrains
Learning Model Predictive Control for Quadrotors